pvedps法师 火法天赋打本 冰法升级带副本牧师 暗影天赋 突然崛起 不知为何术士 表现不错 不过法师对他们有压力盗贼 会有爱的 盗贼朋友们 你们永远是标杆 我相信治疗 牧师 奶骑 奶德 奶萨(嗜血 团队必带)坦克 战士 骑士 死骑(我虽
天宫机械臂原理 中国空间站机械臂
2024-09-19 09:433695 竹戈雅
我国首个具有七个自由度的机械臂,从而在太空可以实现类似人类手臂的运动能力,工作时最长长度可达18米左右、直径约4米左右,可以在太空抓取物体,方便设备的对接、安装、变轨、分离等操作。这是对人类手臂的最真实还原。核心舱机械臂通过末端执行器与目标
我国首个具有七个自由度的机械臂,从而在太空可以实现类似人类手臂的运动能力,工作时最长长度可达18米左右、直径约4米左右,可以在太空抓取物体,方便设备的对接、安装、变轨、分离等操作。
这是对人类手臂的最真实还原。核心舱机械臂通过末端执行器与目标适配器之间的对接与分离,类似于木工常用的榫卯结构,可实现舱体爬行功能,以一种类似蠕虫的运动方式移动到空间站的许多部分,进而在更大范围触达空间站各舱体外表面。
七个关节驱动组件及高精度位置传感器是实现机械臂运动、精确定位的执行机构,作为机械臂的核心部件,需具备小体积、大转矩输出,待机械臂运行到指定位置后,可实现定位锁定功能,从而使机械臂固定在相应位置,以及到位锁定后由末端执行驱动组件实现目标捕获及抓取的功能。
相关文章
- 详细阅读
-
哪有最靠谱最经典的棋牌小游戏 象棋类小游戏详细阅读
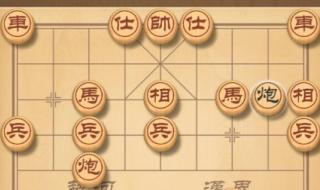
棋牌类游戏非常适合多人休闲娱乐,下面笔者来推荐一些比较有趣的棋牌类游戏斗地主《斗地主》可以说是国内非常流行的一种扑克牌玩法了,三个人一副牌即可,玩法简单,目的明确,二人合作围攻“地主”即可。地主的优势在于先手和多出额外的三张牌。游戏本身有顺
-
农村信用社贷款利率 农村信用社贷款利率详细阅读
是依照央行贷 款的基准利率为标准,按照贷款人的 具体情况调整,下限是基准利率的0.9 倍,上限是基准利率的2.3倍。具体如 下:1、农村信用社商业贷款利率: 6个 月以下(含6个月的)利率是5.60%, 6个月至1年(含1年)利率是6.00
-
清洗吸污车前景如何 吸污车价格详细阅读

长期以来,吸粪车、吸污车一直得到国家相关政策的扶持和帮助,这类车辆无需缴纳购置税。吸粪车、吸污车的主要能力是用于吸取粪便、污水、泥浆、液体和小块悬浮杂物。它具有吸水效率高、自吸、自排和直接灌溉的特点,广泛应用于大、中、小城镇环卫、市政、农业
-
灵活用工是什么意思 灵活用工平台运营详细阅读
灵活用工,顾名思义,还在已在一个劳动力市场范围,灵活代表着其具有多变性,不局限于一种。意在打破传统的用工形式,改变劳动关系,在新时代,尤其疫情的影响过后,灵活用工可能会更加符合中小企业的生存之道。常见的灵工类型有很多种,劳务、劳务派遣、外包
-
小米11青春版优缺点 小米青春版详细阅读

小米11青春版优点,超级轻薄的机身尺寸。作为现在小米所有在售手机里面最轻巧便携的一个型号,整体来说算是小米手机中目前最轻薄的在售机型,6.81mm的机身厚度搭配159克的机身重量,多彩后盖颜色。你在购买的时候可以根据自己的喜好选择更多的颜色
-
游鸿明歌曲代表作 游鸿明新歌详细阅读

1《下沙》游鸿明每次商演必唱曲目。 2.《爱我的人和我爱的人》20世纪港台十佳金曲之一 3.《白色恋人》游鸿明千禧年后最佳作品 4.《孟婆汤》游鸿明金曲之一,是游式情歌中比较热门的歌曲 5.《一天一万年》6《楼下那个女人》7《诗人的眼泪》8
-
达式常演过的早年电影 演员达式常详细阅读
1. 《鬼迷心窍》(1987年):这是达式常的首部电影作品,他在片中饰演一个小混混。2. 《英雄本色》(1986年):这是一部警匪片,达式常在片中扮演反派角色。3. 《赌神》(1989年):这是一部香港经典喜剧电影,达式常在片中饰演赌神的助
-
2020年中国东京奥运会奖牌榜明细 2021东京奥运会奖牌榜详细阅读

2020年东京奥运会中国体育代表团是中国派出参与第32届夏季奥林匹克运动会的代表团。 中国大陆共派出431位运动员(女运动员298人、男运动员133人)参赛的中国代表团,最终以38金、32银、18铜,共计88枚奖牌位列奖牌榜第二位,追
-
名侦探柯南里园子和京极真是怎么认识的啊 园子京极真详细阅读

一、名侦探柯南中出现铃木园子和京极真的集数:1、第163~164集,园子的危险夏日物语。2、第289~290集,情人节的真相上下(京极在下集中有出场顺便救了小兰他们)。3、第497~498集,园子的红色手帕前后篇。4、第644集,猴子和熊手
-
荒野乱斗新赛季怎么解锁别的英雄 荒野乱斗开英雄技巧详细阅读
在荒野乱斗新赛季中,要解锁其他英雄,你可以按照以下步骤进行:打开游戏,进入商店。在商店中,找到并点击“英雄”标签。在英雄界面中,你可以看到所有可解锁的英雄。每个英雄都有其自己的解锁条件。有些英雄可能需要你用宝石购买,而有些英雄可能需要你达到